 View Large
View LargeTrailing Arm Redesign of Trailing Suction Hopper Dredger

Trailer Arm Redesign of Trailing Suction Hopper Dredger
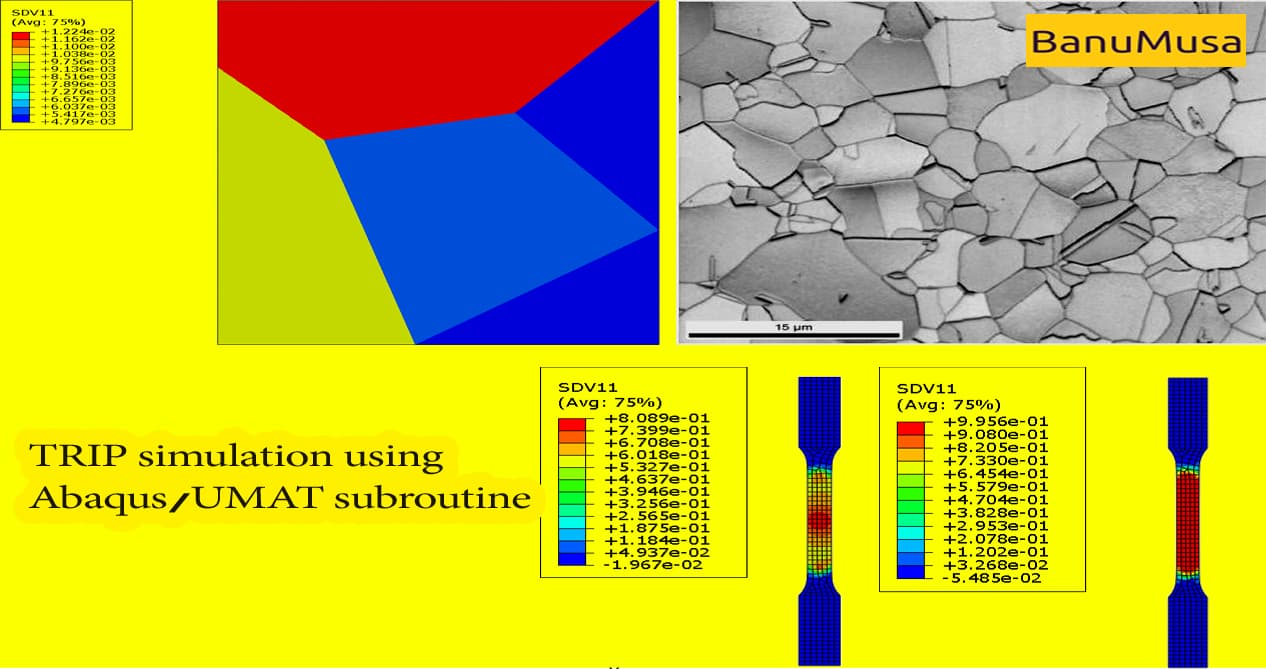
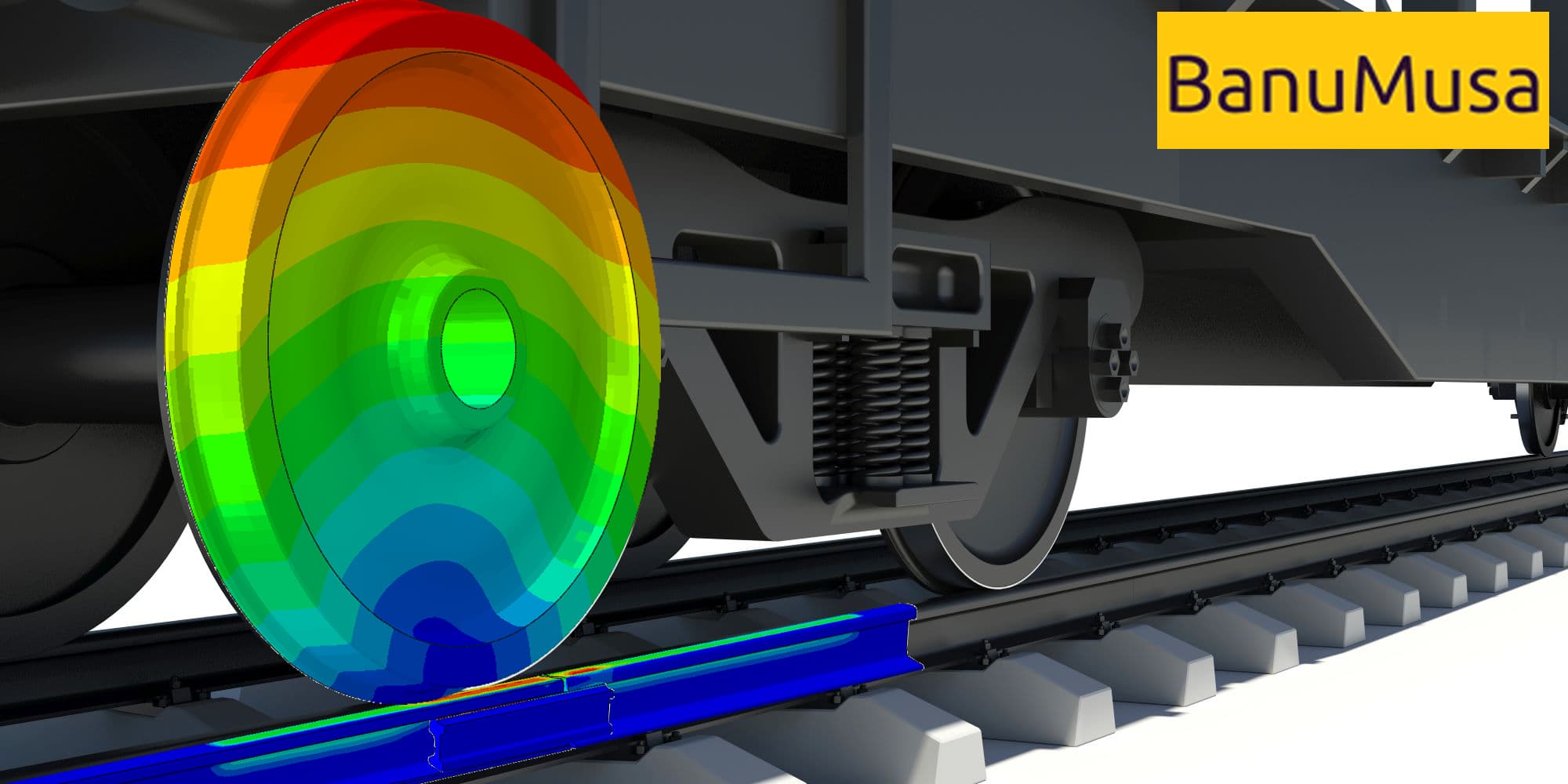
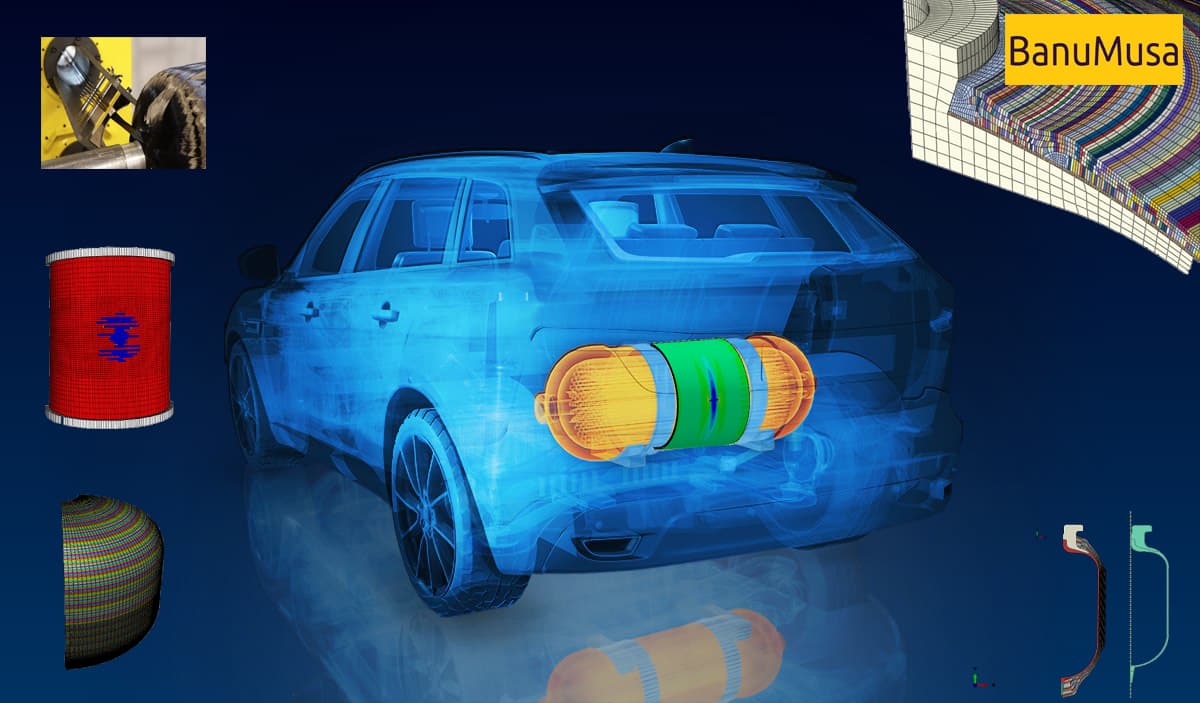
Trailing Suction Hopper Dredger: In this project, the Trailing Suction Hopper Dredger was studied due to its inability to dredge berths with special conditions to improve performance and increase arm range. After conducting the necessary studies, it was agreed to add a new joint to the trailer arm to increase its operating angle. Therefore, strength analysis of the new arm to make changes in the main float was on the agenda using FEM. The results of numerical FEM simulations using Abaqus showed that the newly designed arm is capable of operating in new conditions.
Agenda:
- Design of a new joint of a trailing arm
- Trailing arm stress analysis
- Optimization of the designed trailing arm

Stress analysis trailer arm joint

Trailer arm stress analysis of trailing suction hopper dredger

Stress analysis contour of trailer arm
Contact us for more information.
 6")



 in New Zealand 10")














{kind=link}
{kind=link}
{kind=link}
{kind=link}